��W(xu��)�����W(w��ng)����W(xu��)�����l(f��)��ƽ�_
ú�V���܅f(xi��)��Ѳ�z�C���ˣ��_���Vɽ��ȫ��ƪ��
�������գ��������Ƽ���W(xu��)���ЈF꠳ɹ��аl(f��)��һ��ú�V���܅f(xi��)��ʽѲ�z�C���ˣ�ԓ�C���ˑ{�������M�ļ��g(sh��)��Խ�������Լ�������m��(y��ng)�ԣ������ص�׃���y(t��ng)ú�VѲ�zģʽ����Vɽ��ȫ���{�o�����Ŀһ��(j��ng)�Ƴ������ܵ����ú�V��I(y��)�ĸ߶��P(gu��n)ע���ɹ��D(zhu��n)�Qǰ���V韡�
����
����һ�����g(sh��)���c���༼�g(sh��)�ں���������Ѳ�z
����
������һ����Դ�ںό�(d��o)�����g(sh��)
����
����ᘌ�ú�V���h(hu��n)����(f��)�s��GPS��̖ȱʧ�Ȇ��}��ԓ�C���˄�(chu��ng)���Ե��ں��˼������_��ҕ�X���C�c�T�Ԝy����Ԫ��IMU������(g��u)�������_�T��ҕ�X��̜y��ϵ�y(t��ng)��LIVO�������У��������_ؓ؟����h(hu��n)�������ɸ߾����c�Ɣ�(sh��)��(j��)��ҕ�X���C�t�ṩ�S���ļy����Ϣ����������ȡ��IMU���ڜy���C���˵��ˑB(t��i)�ͼ��ٶȡ����ں��^���У��C�������Ȍ��������_�����е��\��ʧ���M���a����Ȼ��Ӌ�㎬-ӳ���c-ƽ�暈�ͬ�r����ҕ�Xȫ�ֵ؈D����ȡ��ǰҕ���ǃ�(n��i)��ҕ�X�ӵ؈D�������xȺ�c���M��ϡ��ֱ��ҕ�X���R��Ӌ�㎬���؈D�ĈD�����`���K��ͨ�^�`���B(t��i)�����������V���������������_�c�暈��͈D�����`���cIMU�����o���ںϣ����F(xi��n)���_�Ķ�λ�c���D����ʹ�ڵV����(f��)�s���˻��h(hu��n)���У��C����Ҳ�ܑ{��˼��g(sh��)���ʵ��M���Զ�λ��̽��������m(x��)��Ѳ�z�����ṩ�Ԍ��ļ��g(sh��)֧�Ρ�
����
����������5G+VPNͨ�ż��g(sh��)
����
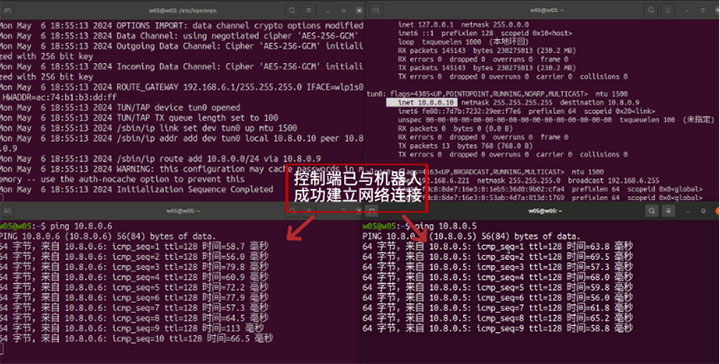
�������Q�V����ͨ����̖��������(w��n)���Ć��}���C���˲�����5G+VPN��ͨ�ŷ�����5G�W(w��ng)�j(lu��)����ߎ����������t���߿ɿ��Ե����c����C�����ṩ�˸��ٷ�(w��n)���Ĕ�(sh��)��(j��)��ݔͨ������VPN���g(sh��)�t�ڴ˻��A(ch��)�Ϙ�(g��u)���˰�ȫ��̓�M���þW(w��ng)�j(lu��)���_����(sh��)��(j��)��ݔ?sh��)ı����Ժ������ԡ�ͨ�^��VPN�������Ʒ���(w��)�����c5G�W(w��ng)�j(lu��)��ݔ��Y(ji��)�ϣ��C�����܉�?q��)��F(xi��n)�c�������ĵČ��r����ȫͨ�š��ڵV���£��C���˿��Ԍ��ɼ����ĸ��(sh��)��(j��)����h(hu��n)������(sh��)���O(sh��)���B(t��i)��ҕ�l�D��ȣ����r��ݔ������������ģ�ͬ�r����������Ҳ�ܼ��r��C�������_ָ����F(xi��n)�h�̲ٿغͅf(xi��)ͬ���I(y��)���@�Nͨ�ŷ������H�����Ѳ�z������Ч�ʺ͜ʴ_�ԣ�߀��Ч��������ͨ�Ź��ό�(d��o)�µİ�ȫ�L(f��ng)�U��
����
�����C������������M��VR+��(sh��)�\�����g(sh��)��������ˆT�ṩ��һ������ʽ���h�̱O(ji��n)�غͲ���ƽ�_��ͨ�^��VRƽ�_��(g��u)���V���Ĕ�(sh��)�\��ģ�ͣ������ˆT�·����R�侳������ֱ�^���^��V���µĭh(hu��n)���͙C���˵Ĺ�����B(t��i)�����@��̓�M�h(hu��n)���У������ˆT�܉�?q��)��r�@ȡ�C���˵�λ�á��ˑB(t��i)����������(sh��)��(j��)����Ϣ��������(j��)���H���C�����M�о��ʿ��ơ����磬�����ˆT����ͨ�^VR�O(sh��)���^��C����������е�Ѳ�z��r�����l(f��)�F(xi��n)�����r���������_ָ���{(di��o)���C���˵��Є�·�������΄�(w��)�����⣬��(sh��)�\��ģ��߀�܉�?q��)��V���h(hu��n)���͙C���˵��\�Р�B(t��i)�M�Ќ��rģ�M���A(y��)�y�����������ˆT��ǰ�ƶ���(y��ng)�����ԣ����Ѳ�z�����������Ժ�ǰհ�ԡ�
����
������һ���յf(xi��)ͬ�����w���V
����
����ԓ�C���˄�(chu��ng)���Եز����˿յf(xi��)ͬ����ģʽ����Ⱥ�����Ď�ʽѲ�z�C���ˡ�׃��ʽ�յɗ�Ѳ�z�C���˺����f(xi��)���C���ˡ��Ď�ʽ�C��������N�����������ڏ�(f��)�s����з�(w��n)�����������O(sh��)��ͭh(hu��n)���M�н����x�z�y��׃��ʽ�յɗ��C���˄t�ܸ���(j��)�΄�(w��)������ꑵ����Ϳ����w��ģʽ�g�����ГQ���p�ɿ�Խ�ϵK����ٵ��_ָ��λ�ã����F(xi��n)���V����ȫ��λ����Ѳ�z���ڌ��H��(y��ng)���У��յؙC������f(xi��)������(y��u)�ݻ��a�����磬�ڙz�y�V��ͨ�L(f��ng)��r�r���յɗ��C���˿ɿ����w��ͨ�L(f��ng)��̎�M�К��w�z�y�����Ď�ʽ�C���˄t�������(n��i)�M���O(sh��)��Ѳ�z�����߅f(xi��)ͬ��������������Ѳ�zЧ�ʺ��w������
����
����������׃���O(sh��)Ӌ���m��(y��ng)����
����
����׃��ʽ�յɗ��C���˵Ī����O(sh��)Ӌʹ��߂䏊����m��(y��ng)�ԡ���ģ�B(t��i)�ГQϵ�y(t��ng)���ø߾��Ȕ�(sh��)�ֶ�C���]�h(hu��n)����ϵ�y(t��ng)���܉�?q��)��F(xi��n)�w���cꑵ�ģʽ�Ŀ��١��ɿ��ГQ�����w��ģʽ�£��C���������������a(ch��n)���������ڿ����w�У�����Ч���_�����ϵK����ٵ��_�˹��y�Ե��_�ą^(q��)����ꑵ�ģʽ�£��C���˄t�ГQ��݆ʽ��ͨ�^���Ƶ����D(zhu��n)�ӟoˢ늙C�(q��)��݆ݞ�����F(xi��n)��(w��n)�������⣬�C���˵ęC�۲���T700̼�w�S�ܺ�3Kб�y̼�w�S���|(zh��)݆ݞ���ȱ��C�˽Y(ji��)��(g��u)���ȣ��֜p�p�����أ�����˙C���Ժ��m(x��)���������@�N׃���O(sh��)Ӌʹ�ÙC�����܉��ڲ�ͬ���κ��΄�(w��)�������`���ГQ���m��(y��ng)ú�V���¶�׃�ĭh(hu��n)���l����
����
�������������ؿ��ɔ_����(w��n)���ɿ�
����
�����C���˴��d�����ؿ��ɔ_FOC����ϵ�y(t��ng)���܉���Ч����ú�V�����(n��i)��늴�����FOC����ϵ�y(t��ng)ͨ�^���_����늙C�Ĵň������F(xi��n)��Ч����(w��n)����늙C�(q��)�ӡ���ú�V���£����ڴ��ڴ�����늚��O(sh��)��ͽ��ٽY(ji��)��(g��u)��늴Ÿɔ_���}ʮ��ͻ����ԓ���ؿ��ɔ_�O(sh��)Ӌͨ�^Ӳ���V����ܛ���㷨��(y��u)���Լ�늴����εȶ��ش�ʩ���_���C�����ڏ�(f��)�s늴ŭh(hu��n)���µķ�(w��n)���\�С���ʹ�ڏ�늴Ÿɔ_����r�£��C����Ҳ�ܜʴ_���պ͈�(zh��)�п���ָ����ַ�(w��n)������������B(t��i)������Ѳ�z�΄�(w��)������M�С�
����
������������Խ����(w��n)���ɿ���“�Vɽ�l(w��i)ʿ”
����
������һ���m(x��)��������ɫ
����
���������ܜyԇ�У�ԓ�C����չ�F(xi��n)���������@�@���m(x��)��������ꑵؙC������ģ�M�V���h(hu��n)���У��܉��B�m(x��)���g�����I(y��)8С�r���ң��M��ú�V�L�r�gѲ�z���������Ч����Դ����ϵ�y(t��ng)�����ɛ]��ԓϵ�y(t��ng)�܉�?q��)��r�O(ji��n)�y늳ؠ�B(t��i)����늳��M�����ܳ��늿��ƣ���ͨ�^��(y��u)�����Դ������ԣ��_���������ڹ����^���Ы@�÷�(w��n)�����������(y��ng)��ͬ�r���C����߀����˳������ģ�M��������Դ������늳��������r����������܉r�ṩ���֧�֣��Mһ�����L�C���˵Ĺ����r�g���_��Ѳ�z�΄�(w��)���B�m(x��)�ԡ�
����
�����������Զ�λ���ȸ�
����
����ꑵؙC�����Զ�λ�`�������0.01m-0.05m������(n��i)���@һ�@�˵ľ���ˮƽ��Ѳ�z�����Ĝʴ_���ṩ���������ϡ��ڵV���£��C���˵ĸ߾����Զ�λ����ʹ���܉����A(y��)�O(sh��)��Ѳ�z·��������������λ�`�(d��o)�µ�Ѳ�z�z©���؏�(f��)���oՓ�ǪMխ�����߀�Ǐ�(f��)�s�Ľ���ڣ��C���˶��ܜʴ_���R�e�Լ���λ�ò���(zh��)������(y��ng)��Ѳ�z�΄�(w��)�����磬�ڌ��V���еĹܵ�����|�M��Ѳ�z�r���C�����܉������ܵ�����|�������Ƅӣ����r�l(f��)�F(xi��n)���ڵİ�ȫ�[����
����
����׃��ʽ�յɗ��o�˙C���w��ģʽ�£������ڟoGPS��̖��ؓ�d2kg����r�£����܌��F(xi��n)λ��Ư�ƃH±3cm�ķ�(w��n)����ͣ������w���ٶȿ��_10.2m/s���δ��m(x��)��10��犣��ГQ��ꑵ�ģʽ������ƽ̹��������ٶȿ��_1m/s���߂��Խ5cm�_�A��Խ���������δ��m(x��)�����L��30��犡����w��ģʽ�£��o�˙C�܉�����wԽ�V����(n��i)�ĸ��N�ϵK���֧�ܡ��ܵ��ȣ����V��픲���ͨ�L(f��ng)�ڵ��y�Ե��_�ą^(q��)���M��ȫ��z�y����ꑵ�ģʽ�£��o�˙C�t���Է�(w��n)������������(n��i)���������O(sh��)��ͭh(hu��n)���M�м���Ѳ�z�����ɫ��Խ���������m(x��)������ʹ�ÙC�����܉��ڏ�(f��)�s�V���h(hu��n)���и�Ч���Ѳ�z�΄�(w��)��
����
�����ġ��Fꠌ��������о�Ӣ�R�ۣ���(chu��ng)�³ɹ��l��
����
������һ�����I(y��)ָ��(d��o)�̎����I(l��ng)
����
����ԓ�Ŀ�ɺ������Ƽ���W(xu��)���Y������I(l��ng)�ָ��(d��o)��ָ��(d��o)�̎��ڙC���˼��g(sh��)���Ԅӻ����ơ��˹����ܵ��I(l��ng)��������Č��I(y��)֪�R���S���Ŀ��н�(j��ng)����?y��u)�F��ṩ��ȫ��ļ��g(sh��)ָ��(d��o)�͌��I(y��)�Ľ��h�����Ŀ���x�}�������O(sh��)Ӌ�����g(sh��)���F(xi��n)��ȫ�̅��c��������P(gu��n)���ڈF��������g(sh��)�y�}�r��ָ��(d��o)�̎��{�������ČW(xu��)�g(sh��)��Ԅ�͌��`��(j��ng)��S������W(xu��)���ṩ���P(gu��n)�I�Ե�ָ��(d��o)�������F�ͻ�Ƽ��g(sh��)ƿ�i���Ƅ��Ŀ������Mչ��
����
�������ЈFꠅR���ˁ��Բ�ͬ�W(xu��)�Ƶă�(y��u)�㱾�������ɆT���w�Cе���̡���ӹ��̡�Ӌ��C�ƌW(xu��)���Ԅӻ����Ƶȶ������I(y��)�I(l��ng)���@�N��W(xu��)�Ƶ��˲ŽY(ji��)��(g��u)���Ŀ���аl(f��)�ṩ��ȫ��ļ��g(sh��)֧�֡��Cе���̌��I(y��)�ČW(xu��)��ؓ؟�C���˵ęCе�O(sh��)Ӌ�ͽY(ji��)��(g��u)��(y��u)�����_���C���˾߂����õęC���Ժͷ�(w��n)���ԣ���ӹ��̌��I(y��)�ČW(xu��)���Г���Ӳ���·���O(sh��)Ӌ�c�{(di��o)ԇ��������C���˴�˸�Ч�ɿ������ϵ�y(t��ng)��Ӌ��C�ƌW(xu��)���I(y��)�ČW(xu��)���t��ע�ڌ�(d��o)���㷨���D��̎������(sh��)��(j��)ͨ�ŵ�ܛ��������аl(f��)���x���˙C�������ܻ���“���X”���Ԅӻ����ƌ��I(y��)�ČW(xu��)����(y��u)���C���˵Ŀ���ϵ�y(t��ng)�����F(xi��n)�˙C���˵ľ��ʲٿغ��Ԅӻ����I(y��)�������I(y��)�W(xu��)�����Ŀ�г�ְl(f��)�]�Լ��Č��I(y��)��(y��u)�ݣ��o�ܺ������γ��ˏ�����аl(f��)������
����
�������������гɹ��S�T
����
�����F��Գ����ԁ����ڸ�Ƽ���(chu��ng)�¸�ِ�Ќҫ@�ѿ����Ⱥ�s�@���Ҽ���ʡ����헶�헣����չʾ�ˈF꠵Ą�(chu��ng)�����Ϳ���ˮƽ���@Щ�s�u��ȡ�ò��H�nj��F��^��Ŭ���Ŀ϶���Ҳ���Ŀ���Mһ���l(f��)չ�춨�ˈԌ��Ļ��A(ch��)�����Ŀ�аl(f��)�^���У��F꠳ɆT�e�O���c����Ӗ(x��n)�������������Լ��Ŀ��������̈́�(chu��ng)��˼�S����������ِ�зe�۵Ľ�(j��ng)�ͼ��g(sh��)��(y��ng)�õ����Ŀ���аl(f��)�У��ɹ���Q�˶����P(gu��n)�I���g(sh��)�y�}���_���Ŀ��������M���|(zh��)����ɡ�
����
����Ŀǰ��ԓ�Ŀ���c��Ҵ���ú�V��I(y��)�_�ɺ��������������F(xi��n)���гɹ��Ŀ����D(zhu��n)��������ú�V��I(y��)���ԣ�����ԓ���܅f(xi��)��Ѳ�z�C���ˌ����������@��Ч�档
����
������һ�������˹��ɱ�
����
�������y(t��ng)ú�VѲ�z��Ҫ��ه�˹�����ҪͶ������������͕r�g����ԓ�C���˵đ�(y��ng)�Ì����p���˹�Ѳ�z���l�κ�������������I(y��)�������ɱ�Ͷ�롣һ�_�C���˿��ԳГ��ஔ�ڶ���Ѳ�z�ˆT�Ĺ����΄�(w��)�����܉�?q��)��F(xi��n)24С�r���g�����I(y��)�������Ѳ�z������Ч�ʺͽ�(j��ng)���ԡ�
����
����������������ȫˮƽ
����
����ú�V���h(hu��n)�����ӣ��˹�Ѳ�z���R����İ�ȫ�L(f��ng)�U���C���˴����˹��M��Σ�U�^(q��)���M��Ѳ�z����Ч���������˹�����ʧ�`��h(hu��n)�����،�(d��o)�µİ�ȫ�¹ʣ������˵V����������ȫ��ͬ�r���C�����܉�?q��)��r�O(ji��n)�y�V���h(hu��n)�����O(sh��)���B(t��i)�����r�l(f��)�F(xi��n)���ڵİ�ȫ�[�����l(f��)��������I(y��)��ȡ�A(y��)����ʩ�ṩ�˳���ĕr�g���Ķ������¹ʰl(f��)���ʣ�����ú�V��I(y��)�����w��ȫ����ˮƽ��
����
����������������a(ch��n)��
����
����ԓ�C���˾߂��Ч��Ѳ�z�����Ϳ���푑�(y��ng)�C�ƣ��܉r�l(f��)�F(xi��n)�O(sh��)����Ϻ����a(ch��n)�^���еĆ��}��������Ϣ�������������ġ���I(y��)����Ѹ�ٰ��žS���ˆT�M��̎�����p���O(sh��)��ͣ�C�r�g�����a(ch��n)�Д���l�ʣ�������a(ch��n)���B�m(x��)�Ժͷ�(w��n)���ԡ����⣬�C����߀����ͨ�^���V���h(hu��n)���Č��r�O(ji��n)�y������I(y��)�����a(ch��n)�Q���ṩ�ʴ_�Ĕ�(sh��)��(j��)֧�֣�������I(y��)��(y��u)�����a(ch��n)���ֺ�ˇ���̣��Mһ��������a(ch��n)Ч�ʺͽ�(j��ng)��Ч�档
����
�������ģ��������ߌ�(d��o)��
����
�����S�����Ҍ�ú�V��ȫ���a(ch��n)�����ܻ����O(sh��)����ҕ�̶Ȳ�����ߣ����P(gu��n)���ߌ�ú�V��I(y��)�����ܻ�����������������_Ҫ��ԓ���܅f(xi��)��Ѳ�z�C���˵đ�(y��ng)�ã�������ú�V��I(y��)���F(xi��n)���ܻ��D(zhu��n)�ͣ��M�����߷�Ҏ(gu��)��Ҫ��������I(y��)�����������Ј�����������I(y��)���Խ�˙C���������õ��ИI(y��)�˗U�����I(l��ng)ú�V�ИI(y��)�ļ��g(sh��)�l(f��)չ������
����
��������δ��չ�������I(l��ng)�VɽѲ�z���ܻ��l(f��)չ
����
�����������Ƽ���W(xu��)���ЈF꠳ɹ��аl(f��)��ú�V���܅f(xi��)��ʽѲ�z�C���ˣ���Vɽ��ȫѲ�z�ṩ��һ�N���ܻ�����Ч�����ɿ�����ȫ�½�Q������ԓ�Ŀ�ڼ��g(sh��)��(chu��ng)�¡�ϵ�y(t��ng)���ܡ��F��O(sh��)�Լ��ɹ��D(zhu��n)���ȷ����ȡ�����@����Ч�����ЏV韵đ�(y��ng)��ǰ������Ҫ���ИI(y��)���x��
����
������δ���İl(f��)չ�У��S�����g(sh��)�IJ����������ƣ�ú�V���܅f(xi��)��Ѳ�z�C���ˌ��ڸ���ú�V��I(y��)�еõ��ƏV��(y��ng)�ã����҇�ú̿���I(y��)�İ�ȫ���a(ch��n)�����ܻ��l(f��)չע�돊�������ͬ�r��ԓ�C���˵��аl(f��)��(j��ng)�ͼ��g(sh��)�ɹ�Ҳ�����������P(gu��n)�I(l��ng)������ܻ��b���аl(f��)�ṩ������b���Ƅ��҇����ܙC���˼��g(sh��)�ڹ��I(y��)�I(l��ng)��ďV����(y��ng)�á��҂����������ţ��ڿ��ЈF꠵ij��m(x��)Ŭ����ú�V��I(y��)�ķe�O����£�ú�V���܅f(xi��)��Ѳ�z�C���ˌ��ڵVɽ��ȫ�I(l��ng)��l(f��)�]Խ��Խ��Ҫ�����ã��_���Vɽ����Ѳ�z���¼oԪ�����҇�����Դ�a(ch��n)�I(y��)��ȫ�l(f��)չ���{�o����
����
����һ�����g(sh��)���c���༼�g(sh��)�ں���������Ѳ�z
����
������һ����Դ�ںό�(d��o)�����g(sh��)
����
����ᘌ�ú�V���h(hu��n)����(f��)�s��GPS��̖ȱʧ�Ȇ��}��ԓ�C���˄�(chu��ng)���Ե��ں��˼������_��ҕ�X���C�c�T�Ԝy����Ԫ��IMU������(g��u)�������_�T��ҕ�X��̜y��ϵ�y(t��ng)��LIVO�������У��������_ؓ؟����h(hu��n)�������ɸ߾����c�Ɣ�(sh��)��(j��)��ҕ�X���C�t�ṩ�S���ļy����Ϣ����������ȡ��IMU���ڜy���C���˵��ˑB(t��i)�ͼ��ٶȡ����ں��^���У��C�������Ȍ��������_�����е��\��ʧ���M���a����Ȼ��Ӌ�㎬-ӳ���c-ƽ�暈�ͬ�r����ҕ�Xȫ�ֵ؈D����ȡ��ǰҕ���ǃ�(n��i)��ҕ�X�ӵ؈D�������xȺ�c���M��ϡ��ֱ��ҕ�X���R��Ӌ�㎬���؈D�ĈD�����`���K��ͨ�^�`���B(t��i)�����������V���������������_�c�暈��͈D�����`���cIMU�����o���ںϣ����F(xi��n)���_�Ķ�λ�c���D����ʹ�ڵV����(f��)�s���˻��h(hu��n)���У��C����Ҳ�ܑ{��˼��g(sh��)���ʵ��M���Զ�λ��̽��������m(x��)��Ѳ�z�����ṩ�Ԍ��ļ��g(sh��)֧�Ρ�
����
����������5G+VPNͨ�ż��g(sh��)
����
�������Q�V����ͨ����̖��������(w��n)���Ć��}���C���˲�����5G+VPN��ͨ�ŷ�����5G�W(w��ng)�j(lu��)����ߎ����������t���߿ɿ��Ե����c����C�����ṩ�˸��ٷ�(w��n)���Ĕ�(sh��)��(j��)��ݔͨ������VPN���g(sh��)�t�ڴ˻��A(ch��)�Ϙ�(g��u)���˰�ȫ��̓�M���þW(w��ng)�j(lu��)���_����(sh��)��(j��)��ݔ?sh��)ı����Ժ������ԡ�ͨ�^��VPN�������Ʒ���(w��)�����c5G�W(w��ng)�j(lu��)��ݔ��Y(ji��)�ϣ��C�����܉�?q��)��F(xi��n)�c�������ĵČ��r����ȫͨ�š��ڵV���£��C���˿��Ԍ��ɼ����ĸ��(sh��)��(j��)����h(hu��n)������(sh��)���O(sh��)���B(t��i)��ҕ�l�D��ȣ����r��ݔ������������ģ�ͬ�r����������Ҳ�ܼ��r��C�������_ָ����F(xi��n)�h�̲ٿغͅf(xi��)ͬ���I(y��)���@�Nͨ�ŷ������H�����Ѳ�z������Ч�ʺ͜ʴ_�ԣ�߀��Ч��������ͨ�Ź��ό�(d��o)�µİ�ȫ�L(f��ng)�U��
����
����������VR+��(sh��)�\�����g(sh��)����
�����C������������M��VR+��(sh��)�\�����g(sh��)��������ˆT�ṩ��һ������ʽ���h�̱O(ji��n)�غͲ���ƽ�_��ͨ�^��VRƽ�_��(g��u)���V���Ĕ�(sh��)�\��ģ�ͣ������ˆT�·����R�侳������ֱ�^���^��V���µĭh(hu��n)���͙C���˵Ĺ�����B(t��i)�����@��̓�M�h(hu��n)���У������ˆT�܉�?q��)��r�@ȡ�C���˵�λ�á��ˑB(t��i)����������(sh��)��(j��)����Ϣ��������(j��)���H���C�����M�о��ʿ��ơ����磬�����ˆT����ͨ�^VR�O(sh��)���^��C����������е�Ѳ�z��r�����l(f��)�F(xi��n)�����r���������_ָ���{(di��o)���C���˵��Є�·�������΄�(w��)�����⣬��(sh��)�\��ģ��߀�܉�?q��)��V���h(hu��n)���͙C���˵��\�Р�B(t��i)�M�Ќ��rģ�M���A(y��)�y�����������ˆT��ǰ�ƶ���(y��ng)�����ԣ����Ѳ�z�����������Ժ�ǰհ�ԡ�
����
����������(chu��ng)��(y��u)�ݣ���Ⱥʽ�f(xi��)������Ѳ�zЧ������
������һ���յf(xi��)ͬ�����w���V
����
����ԓ�C���˄�(chu��ng)���Եز����˿յf(xi��)ͬ����ģʽ����Ⱥ�����Ď�ʽѲ�z�C���ˡ�׃��ʽ�յɗ�Ѳ�z�C���˺����f(xi��)���C���ˡ��Ď�ʽ�C��������N�����������ڏ�(f��)�s����з�(w��n)�����������O(sh��)��ͭh(hu��n)���M�н����x�z�y��׃��ʽ�յɗ��C���˄t�ܸ���(j��)�΄�(w��)������ꑵ����Ϳ����w��ģʽ�g�����ГQ���p�ɿ�Խ�ϵK����ٵ��_ָ��λ�ã����F(xi��n)���V����ȫ��λ����Ѳ�z���ڌ��H��(y��ng)���У��յؙC������f(xi��)������(y��u)�ݻ��a�����磬�ڙz�y�V��ͨ�L(f��ng)��r�r���յɗ��C���˿ɿ����w��ͨ�L(f��ng)��̎�M�К��w�z�y�����Ď�ʽ�C���˄t�������(n��i)�M���O(sh��)��Ѳ�z�����߅f(xi��)ͬ��������������Ѳ�zЧ�ʺ��w������
����
����������׃���O(sh��)Ӌ���m��(y��ng)����
����
����׃��ʽ�յɗ��C���˵Ī����O(sh��)Ӌʹ��߂䏊����m��(y��ng)�ԡ���ģ�B(t��i)�ГQϵ�y(t��ng)���ø߾��Ȕ�(sh��)�ֶ�C���]�h(hu��n)����ϵ�y(t��ng)���܉�?q��)��F(xi��n)�w���cꑵ�ģʽ�Ŀ��١��ɿ��ГQ�����w��ģʽ�£��C���������������a(ch��n)���������ڿ����w�У�����Ч���_�����ϵK����ٵ��_�˹��y�Ե��_�ą^(q��)����ꑵ�ģʽ�£��C���˄t�ГQ��݆ʽ��ͨ�^���Ƶ����D(zhu��n)�ӟoˢ늙C�(q��)��݆ݞ�����F(xi��n)��(w��n)�������⣬�C���˵ęC�۲���T700̼�w�S�ܺ�3Kб�y̼�w�S���|(zh��)݆ݞ���ȱ��C�˽Y(ji��)��(g��u)���ȣ��֜p�p�����أ�����˙C���Ժ��m(x��)���������@�N׃���O(sh��)Ӌʹ�ÙC�����܉��ڲ�ͬ���κ��΄�(w��)�������`���ГQ���m��(y��ng)ú�V���¶�׃�ĭh(hu��n)���l����
����
�������������ؿ��ɔ_����(w��n)���ɿ�
����
�����C���˴��d�����ؿ��ɔ_FOC����ϵ�y(t��ng)���܉���Ч����ú�V�����(n��i)��늴�����FOC����ϵ�y(t��ng)ͨ�^���_����늙C�Ĵň������F(xi��n)��Ч����(w��n)����늙C�(q��)�ӡ���ú�V���£����ڴ��ڴ�����늚��O(sh��)��ͽ��ٽY(ji��)��(g��u)��늴Ÿɔ_���}ʮ��ͻ����ԓ���ؿ��ɔ_�O(sh��)Ӌͨ�^Ӳ���V����ܛ���㷨��(y��u)���Լ�늴����εȶ��ش�ʩ���_���C�����ڏ�(f��)�s늴ŭh(hu��n)���µķ�(w��n)���\�С���ʹ�ڏ�늴Ÿɔ_����r�£��C����Ҳ�ܜʴ_���պ͈�(zh��)�п���ָ����ַ�(w��n)������������B(t��i)������Ѳ�z�΄�(w��)������M�С�
����
������������Խ����(w��n)���ɿ���“�Vɽ�l(w��i)ʿ”
����
������һ���m(x��)��������ɫ
����
���������ܜyԇ�У�ԓ�C����չ�F(xi��n)���������@�@���m(x��)��������ꑵؙC������ģ�M�V���h(hu��n)���У��܉��B�m(x��)���g�����I(y��)8С�r���ң��M��ú�V�L�r�gѲ�z���������Ч����Դ����ϵ�y(t��ng)�����ɛ]��ԓϵ�y(t��ng)�܉�?q��)��r�O(ji��n)�y늳ؠ�B(t��i)����늳��M�����ܳ��늿��ƣ���ͨ�^��(y��u)�����Դ������ԣ��_���������ڹ����^���Ы@�÷�(w��n)�����������(y��ng)��ͬ�r���C����߀����˳������ģ�M��������Դ������늳��������r����������܉r�ṩ���֧�֣��Mһ�����L�C���˵Ĺ����r�g���_��Ѳ�z�΄�(w��)���B�m(x��)�ԡ�
����
�����������Զ�λ���ȸ�
����
����ꑵؙC�����Զ�λ�`�������0.01m-0.05m������(n��i)���@һ�@�˵ľ���ˮƽ��Ѳ�z�����Ĝʴ_���ṩ���������ϡ��ڵV���£��C���˵ĸ߾����Զ�λ����ʹ���܉����A(y��)�O(sh��)��Ѳ�z·��������������λ�`�(d��o)�µ�Ѳ�z�z©���؏�(f��)���oՓ�ǪMխ�����߀�Ǐ�(f��)�s�Ľ���ڣ��C���˶��ܜʴ_���R�e�Լ���λ�ò���(zh��)������(y��ng)��Ѳ�z�΄�(w��)�����磬�ڌ��V���еĹܵ�����|�M��Ѳ�z�r���C�����܉������ܵ�����|�������Ƅӣ����r�l(f��)�F(xi��n)���ڵİ�ȫ�[����
����
�������ģ��w���cꑵ�ģʽ���܃�(y��u)������
����׃��ʽ�յɗ��o�˙C���w��ģʽ�£������ڟoGPS��̖��ؓ�d2kg����r�£����܌��F(xi��n)λ��Ư�ƃH±3cm�ķ�(w��n)����ͣ������w���ٶȿ��_10.2m/s���δ��m(x��)��10��犣��ГQ��ꑵ�ģʽ������ƽ̹��������ٶȿ��_1m/s���߂��Խ5cm�_�A��Խ���������δ��m(x��)�����L��30��犡����w��ģʽ�£��o�˙C�܉�����wԽ�V����(n��i)�ĸ��N�ϵK���֧�ܡ��ܵ��ȣ����V��픲���ͨ�L(f��ng)�ڵ��y�Ե��_�ą^(q��)���M��ȫ��z�y����ꑵ�ģʽ�£��o�˙C�t���Է�(w��n)������������(n��i)���������O(sh��)��ͭh(hu��n)���M�м���Ѳ�z�����ɫ��Խ���������m(x��)������ʹ�ÙC�����܉��ڏ�(f��)�s�V���h(hu��n)���и�Ч���Ѳ�z�΄�(w��)��
����
�����ġ��Fꠌ��������о�Ӣ�R�ۣ���(chu��ng)�³ɹ��l��
����
������һ�����I(y��)ָ��(d��o)�̎����I(l��ng)
����
����ԓ�Ŀ�ɺ������Ƽ���W(xu��)���Y������I(l��ng)�ָ��(d��o)��ָ��(d��o)�̎��ڙC���˼��g(sh��)���Ԅӻ����ơ��˹����ܵ��I(l��ng)��������Č��I(y��)֪�R���S���Ŀ��н�(j��ng)����?y��u)�F��ṩ��ȫ��ļ��g(sh��)ָ��(d��o)�͌��I(y��)�Ľ��h�����Ŀ���x�}�������O(sh��)Ӌ�����g(sh��)���F(xi��n)��ȫ�̅��c��������P(gu��n)���ڈF��������g(sh��)�y�}�r��ָ��(d��o)�̎��{�������ČW(xu��)�g(sh��)��Ԅ�͌��`��(j��ng)��S������W(xu��)���ṩ���P(gu��n)�I�Ե�ָ��(d��o)�������F�ͻ�Ƽ��g(sh��)ƿ�i���Ƅ��Ŀ������Mչ��
����
������������W(xu��)���˲Ņf(xi��)ͬ����
�������ЈFꠅR���ˁ��Բ�ͬ�W(xu��)�Ƶă�(y��u)�㱾�������ɆT���w�Cе���̡���ӹ��̡�Ӌ��C�ƌW(xu��)���Ԅӻ����Ƶȶ������I(y��)�I(l��ng)���@�N��W(xu��)�Ƶ��˲ŽY(ji��)��(g��u)���Ŀ���аl(f��)�ṩ��ȫ��ļ��g(sh��)֧�֡��Cе���̌��I(y��)�ČW(xu��)��ؓ؟�C���˵ęCе�O(sh��)Ӌ�ͽY(ji��)��(g��u)��(y��u)�����_���C���˾߂����õęC���Ժͷ�(w��n)���ԣ���ӹ��̌��I(y��)�ČW(xu��)���Г���Ӳ���·���O(sh��)Ӌ�c�{(di��o)ԇ��������C���˴�˸�Ч�ɿ������ϵ�y(t��ng)��Ӌ��C�ƌW(xu��)���I(y��)�ČW(xu��)���t��ע�ڌ�(d��o)���㷨���D��̎������(sh��)��(j��)ͨ�ŵ�ܛ��������аl(f��)���x���˙C�������ܻ���“���X”���Ԅӻ����ƌ��I(y��)�ČW(xu��)����(y��u)���C���˵Ŀ���ϵ�y(t��ng)�����F(xi��n)�˙C���˵ľ��ʲٿغ��Ԅӻ����I(y��)�������I(y��)�W(xu��)�����Ŀ�г�ְl(f��)�]�Լ��Č��I(y��)��(y��u)�ݣ��o�ܺ������γ��ˏ�����аl(f��)������
����
�������������гɹ��S�T
����
�����F��Գ����ԁ����ڸ�Ƽ���(chu��ng)�¸�ِ�Ќҫ@�ѿ����Ⱥ�s�@���Ҽ���ʡ����헶�헣����չʾ�ˈF꠵Ą�(chu��ng)�����Ϳ���ˮƽ���@Щ�s�u��ȡ�ò��H�nj��F��^��Ŭ���Ŀ϶���Ҳ���Ŀ���Mһ���l(f��)չ�춨�ˈԌ��Ļ��A(ch��)�����Ŀ�аl(f��)�^���У��F꠳ɆT�e�O���c����Ӗ(x��n)�������������Լ��Ŀ��������̈́�(chu��ng)��˼�S����������ِ�зe�۵Ľ�(j��ng)�ͼ��g(sh��)��(y��ng)�õ����Ŀ���аl(f��)�У��ɹ���Q�˶����P(gu��n)�I���g(sh��)�y�}���_���Ŀ��������M���|(zh��)����ɡ�
����
�����塢�ɹ��D(zhu��n)������ú�V��I(y��)������������
����Ŀǰ��ԓ�Ŀ���c��Ҵ���ú�V��I(y��)�_�ɺ��������������F(xi��n)���гɹ��Ŀ����D(zhu��n)��������ú�V��I(y��)���ԣ�����ԓ���܅f(xi��)��Ѳ�z�C���ˌ����������@��Ч�档
����
������һ�������˹��ɱ�
����
�������y(t��ng)ú�VѲ�z��Ҫ��ه�˹�����ҪͶ������������͕r�g����ԓ�C���˵đ�(y��ng)�Ì����p���˹�Ѳ�z���l�κ�������������I(y��)�������ɱ�Ͷ�롣һ�_�C���˿��ԳГ��ஔ�ڶ���Ѳ�z�ˆT�Ĺ����΄�(w��)�����܉�?q��)��F(xi��n)24С�r���g�����I(y��)�������Ѳ�z������Ч�ʺͽ�(j��ng)���ԡ�
����
����������������ȫˮƽ
����
����ú�V���h(hu��n)�����ӣ��˹�Ѳ�z���R����İ�ȫ�L(f��ng)�U���C���˴����˹��M��Σ�U�^(q��)���M��Ѳ�z����Ч���������˹�����ʧ�`��h(hu��n)�����،�(d��o)�µİ�ȫ�¹ʣ������˵V����������ȫ��ͬ�r���C�����܉�?q��)��r�O(ji��n)�y�V���h(hu��n)�����O(sh��)���B(t��i)�����r�l(f��)�F(xi��n)���ڵİ�ȫ�[�����l(f��)��������I(y��)��ȡ�A(y��)����ʩ�ṩ�˳���ĕr�g���Ķ������¹ʰl(f��)���ʣ�����ú�V��I(y��)�����w��ȫ����ˮƽ��
����
����������������a(ch��n)��
����
����ԓ�C���˾߂��Ч��Ѳ�z�����Ϳ���푑�(y��ng)�C�ƣ��܉r�l(f��)�F(xi��n)�O(sh��)����Ϻ����a(ch��n)�^���еĆ��}��������Ϣ�������������ġ���I(y��)����Ѹ�ٰ��žS���ˆT�M��̎�����p���O(sh��)��ͣ�C�r�g�����a(ch��n)�Д���l�ʣ�������a(ch��n)���B�m(x��)�Ժͷ�(w��n)���ԡ����⣬�C����߀����ͨ�^���V���h(hu��n)���Č��r�O(ji��n)�y������I(y��)�����a(ch��n)�Q���ṩ�ʴ_�Ĕ�(sh��)��(j��)֧�֣�������I(y��)��(y��u)�����a(ch��n)���ֺ�ˇ���̣��Mһ��������a(ch��n)Ч�ʺͽ�(j��ng)��Ч�档
����
�������ģ��������ߌ�(d��o)��
����
�����S�����Ҍ�ú�V��ȫ���a(ch��n)�����ܻ����O(sh��)����ҕ�̶Ȳ�����ߣ����P(gu��n)���ߌ�ú�V��I(y��)�����ܻ�����������������_Ҫ��ԓ���܅f(xi��)��Ѳ�z�C���˵đ�(y��ng)�ã�������ú�V��I(y��)���F(xi��n)���ܻ��D(zhu��n)�ͣ��M�����߷�Ҏ(gu��)��Ҫ��������I(y��)�����������Ј�����������I(y��)���Խ�˙C���������õ��ИI(y��)�˗U�����I(l��ng)ú�V�ИI(y��)�ļ��g(sh��)�l(f��)չ������
����
��������δ��չ�������I(l��ng)�VɽѲ�z���ܻ��l(f��)չ
����
�����������Ƽ���W(xu��)���ЈF꠳ɹ��аl(f��)��ú�V���܅f(xi��)��ʽѲ�z�C���ˣ���Vɽ��ȫѲ�z�ṩ��һ�N���ܻ�����Ч�����ɿ�����ȫ�½�Q������ԓ�Ŀ�ڼ��g(sh��)��(chu��ng)�¡�ϵ�y(t��ng)���ܡ��F��O(sh��)�Լ��ɹ��D(zhu��n)���ȷ����ȡ�����@����Ч�����ЏV韵đ�(y��ng)��ǰ������Ҫ���ИI(y��)���x��
����
������δ���İl(f��)չ�У��S�����g(sh��)�IJ����������ƣ�ú�V���܅f(xi��)��Ѳ�z�C���ˌ��ڸ���ú�V��I(y��)�еõ��ƏV��(y��ng)�ã����҇�ú̿���I(y��)�İ�ȫ���a(ch��n)�����ܻ��l(f��)չע�돊�������ͬ�r��ԓ�C���˵��аl(f��)��(j��ng)�ͼ��g(sh��)�ɹ�Ҳ�����������P(gu��n)�I(l��ng)������ܻ��b���аl(f��)�ṩ������b���Ƅ��҇����ܙC���˼��g(sh��)�ڹ��I(y��)�I(l��ng)��ďV����(y��ng)�á��҂����������ţ��ڿ��ЈF꠵ij��m(x��)Ŭ����ú�V��I(y��)�ķe�O����£�ú�V���܅f(xi��)��Ѳ�z�C���ˌ��ڵVɽ��ȫ�I(l��ng)��l(f��)�]Խ��Խ��Ҫ�����ã��_���Vɽ����Ѳ�z���¼oԪ�����҇�����Դ�a(ch��n)�I(y��)��ȫ�l(f��)չ���{�o����
- ���ߣ���W(xu��)�����W(w��ng) ��Դ����W(xu��)�����W(w��ng)
- �l(f��)���r�g��2025-05-21 ��x��
- ��һ�� ���퐂�x

- ̽�ػ����Ƽ������ܮa(ch��n)�I(y��)�}��
- ������ҵľ��܃x�������Z�Q�����a(ch��n)�������n����Ļ��W(xu��)����ʽ�D(zhu��n)�����挍�Įa(ch��n)Ʒ��һ���e�_�����֪�R��ײ�������ݡ�
- 05-22 �P(gu��n)ע��0
- ú�V���܅f(xi��)��Ѳ�z�C���ˣ��_���Vɽ��ȫ��ƪ��
- ���գ��������Ƽ���W(xu��)���ЈF꠳ɹ��аl(f��)��һ��ú�V���܅f(xi��)��ʽѲ�z�C���ˣ�ԓ�C���ˑ{�������M�ļ��g(sh��)��Խ�������Լ�������m��(y��ng)��
- 05-21 �P(gu��n)ע��7

- ������`���M�����ػ͌W(xu��)�����Lÿһ���h(hu��n)��(ji��)
- �R��С�M�r��(ji��)��һ����M��������������`��ӣ����ڶػ͵���Ұ�l(xi��ng)�g�����ݱ��չ�_��
- 05-21 �P(gu��n)ע��3
- ��W(xu��)��������`���ԡ���������`��Ρ��桱���ʣ�
- ÿ�꺮��٣�ȫ���ԡ�У���M�����������`�ȸ��ӌӳ����F���ɞ��W(xu��)���߳�У�@�����|����Č��F�C����
- 05-19 �P(gu��n)ע��10

- ����ɽ�¡��ȡ����Єӣ��ഺ��������������ȫ����
- �t����ɽ����б���L����ɫ�G�o�ġ�
- 05-17 �P(gu��n)ע��6

- �Lɳ������W(xu��)�W(xu��)���{(di��o)�������z��(sh��)�ֻ�����
- ����һ���X��Ү����һ�����֡��~ɽἸ���{ͨ�^��ҕ�lƽ�_����ȫ����
- 05-17 �P(gu��n)ע��9

- �����}��С�����ӛ䛲ɲ����\�����y(t��ng)��_�S���l(xi��ng)�����d���_
- ��ϵ�y(t��ng)�������ϲɲ�����Ļ���(n��i)���������z�Ļ��ƏV���x���l(xi��ng)�����d�����V�������в��ײɲ����ƏV�{(di��o)�С��Ŀ�F������벩�h���g
- 05-16 �P(gu��n)ע��7

- ��У(li��n)�ӄ�(chu��ng)�·�������ģʽ ��^(q��)���й����������o�W(w��ng)�j(lu��)
- ��ֵ2025���I(y��)��������ܣ��ؑc��ӿƼ��I(y��)��W(xu��)����������F�e�O푑�(y��ng)��һ�����֣�һ���o�n�����������}
- 05-16 �P(gu��n)ע��3
-
��W(xu��)�����W(w��ng)©���(qu��n)����